



選擇性激光燒結(jié)(SLS)的范圍很廣泛,有多種不同的體現(xiàn)方式。一般來說,它是有選擇性地將粉狀材料轉(zhuǎn)化為一個固態(tài)的結(jié)構(gòu)體,而不用先將粉末變?yōu)橐后w。在實際應(yīng)用中會發(fā)生從粉狀固體到液體狀態(tài)再到固體狀態(tài)的相轉(zhuǎn)變,但是速度非??欤@是因為工業(yè)激光所進(jìn)行的應(yīng)用以及大量集中的熱能消散的速度非常快。若想利用這項技術(shù)為制造業(yè)服務(wù),系統(tǒng)必須能夠把金屬粉末和激光功率非常精確地傳輸?shù)饺S結(jié)構(gòu)中的同一位置。為了制造更精細(xì)的產(chǎn)品,零部件尺寸不斷減小,因而在粉末和激光的定位方面對運動精度有著很高的要求(圖1)。

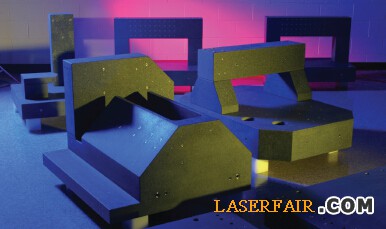
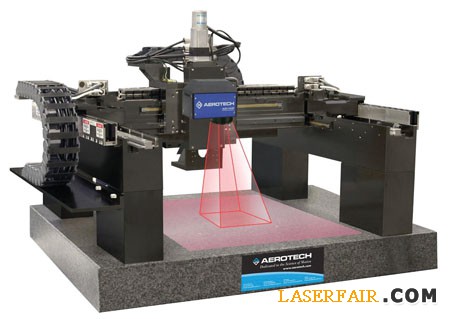
圖1:用選擇性激光燒結(jié)制作的復(fù)雜3D物體。
隨著產(chǎn)品尺寸接近30μm甚至更小,若想使這些功能以精確和可重復(fù)的方式實現(xiàn),SLS系統(tǒng)的所有要素都很關(guān)鍵。例如,SLS的金屬粉末傳送有兩種主要類型。第一種是通過粉末床將更多的粉末材料卷入加工的部件。第二種是將粉末噴嘴頭和激光傳送頭安裝在一起來實現(xiàn)同步燒結(jié)。不管是哪種方法,若要進(jìn)行微燒結(jié)都必須要滿足以下要求:粉末的尺寸要合適;激光光斑必須足夠小,以便能創(chuàng)建一個足夠小的熱影響區(qū);運動系統(tǒng)的精度和可重復(fù)性必須足夠高,才能確保每一次燒結(jié)都是在正確的位置上進(jìn)行。在本文中我們將討論,為了能實現(xiàn)選擇性激光微燒結(jié)所要求的運動,我們在創(chuàng)建一個運動系統(tǒng)時需要考慮的各種因素。
設(shè)計理想的運動系統(tǒng)首先要成竹在胸,這意味著我們必須知道所需要的運動類型。需要怎樣的加速度、速度、精度、可重復(fù)性和跟蹤誤差?在這一評估階段不需要考慮用什么樣的機械解決方案,不管是龍門、XY振鏡掃描頭、簡單的堆疊式平臺解決方案還是它們的任意組合,運動的參數(shù)將為我們提供最優(yōu)的力學(xué)指導(dǎo)。讓我們想象一下,某一個選擇性激光微燒結(jié)在工作點需要個位數(shù)微米的精度。假設(shè)這是一個粉末床上的應(yīng)用,而不是粉末噴嘴。這顯然會限制我們的討論范圍。
機器的底座部件
我們將自下而上,從機器的底座部件開始。首要考慮的是這個機器底座要有足夠剛性,必須沉重而且能抵抗會引起工作點微小振蕩的地面干擾(圖2)。
圖2:花崗巖由于具有出色的平整度,因而是充當(dāng)SLS底座板的理想選擇,平坦的底座將能提高運動系統(tǒng)的性能。
考慮因素包括合適的水平調(diào)節(jié)腳、堅固的金屬結(jié)構(gòu)以及機器底座與底座板之間正確的隔振系統(tǒng)類型。對于一些精密的應(yīng)用,還有必要記錄這臺機器最終安裝位置的地面振動的特點。這能幫助設(shè)計師了解所設(shè)計的機器應(yīng)該能有效地抵抗哪個頻率的振蕩。通常情況下不需要進(jìn)行這一步驟,但有時候機器制造商會就理想的地面特點給出建議。大多數(shù)情況下,機器制造商會針對最常見的情況來設(shè)計系統(tǒng)。隔振系統(tǒng)的復(fù)雜性有所不同,從簡單的被動阻尼材料、被動式空氣隔離、主動式空氣隔離,或是利用一些根據(jù)客戶系統(tǒng)定制的流體來隔離。不管選擇的是什么,在這里都要阻擋所有不必要的頻率。
系統(tǒng)力學(xué)
一旦完成了初步的底座設(shè)計,下一步就是決定實際運動系統(tǒng)的力學(xué)類型。例如,設(shè)計一個圍繞著粉末床的300×300×150mm XYZ運動系統(tǒng),粉末床下方是專用的加粉和水平調(diào)節(jié)系統(tǒng)。工作行程需要在三個維度運動,并且必須能跨越整個粉末床。系統(tǒng)設(shè)計中包括三個方向(X、Y和Z)的線性平臺,并且是傳統(tǒng)的龍門式結(jié)構(gòu)(圖3),即一根橋梁軸連接著雙軸。請注意,一個控制器只能精確定位一個軸平臺,這主要是受到編碼器的分辨率、軸承的機械分辨率和編碼器工作點的位置所限制。對于第一個限制——編碼器分辨率,一般使用調(diào)諧正弦波編碼器反饋來克服。理想的控制器將通過對典型的1Vpp信號應(yīng)用偏移和定標(biāo)因素來調(diào)諧正弦和余弦信號。校正后的信號將被控制器采樣并以內(nèi)插值替換至納米級。龍門結(jié)構(gòu)的軸承選擇將限制高的電子分辨率的實現(xiàn),軸承的摩擦力越小,運動系統(tǒng)就越能進(jìn)一步實現(xiàn)更高的電子分辨率。因此,許多高精度機械的制造商都會考慮氣浮軸承。不過,氣浮軸承不能在真空環(huán)境下工作,它還會受到粉塵污染的制約,并且它的剛性也不如機械軸承方案。最后,考慮到在任意線性軸平臺的角誤差(傾斜、滾擺和偏航),那么確定工作點編碼器的位置非常重要。工作點離軸承和編碼器系統(tǒng)越遠(yuǎn),角誤差就會更進(jìn)一步擴大。
幸運地是,高端運動系統(tǒng)的供應(yīng)商找到了回避這些誤差的方法。例如,對于前面討論的龍門系統(tǒng),平行的龍門基軸或是粉末床兩邊的“桅桿”承載著一個位于粉末床上方的龍門橋梁軸(也是由直線電機驅(qū)動)。這些平行的基軸可能不會與橋梁軸實現(xiàn)完美的正交,但選擇正確的控制器可以通過將偏移應(yīng)用于其中一個基軸或者說“桅桿”上,來“強制”實現(xiàn)正交。這將有助于盡量減少工作點的角誤差。此外,每個編碼器必須進(jìn)行校準(zhǔn),這樣可以在工作點實現(xiàn)最高的精度水平。該校準(zhǔn)程序包括在激光工作點放置反射式光學(xué)器件(安裝到XYZ運動系統(tǒng)上)。激光干涉儀被用作主定位參考,因為被校準(zhǔn)的軸會沿著它的方向運動。
在工作點用激光干涉儀反饋來校準(zhǔn)光學(xué)線性編碼器,將能加強以下兩個方面的表現(xiàn)。第一,它糾正了被校準(zhǔn)的軸向誤差的大小,這主要是由該軸的運動角誤差引起的,而編碼器和工作點之間的距離又放大了該誤差。應(yīng)該指出的是,誤差向量的角要素沒有被糾正。不過,如果是對稱高斯光束或是平頂激光光斑,那么這一誤差的角要素就不是一個重要的考慮因素了。第二,它增加了工作點的軸平臺的原始線性精度。沿著平臺工作的軌跡移動到多個位置,來跟蹤原始編碼器和更精確的干涉儀反饋之間的差異。兩個設(shè)備之間的測量差異將用于生成校準(zhǔn)文件。控制器將使用該校準(zhǔn)文件來確保在工作點精確執(zhí)行指令的運動。
現(xiàn)在,精確校準(zhǔn)的XYZ運動系統(tǒng)已經(jīng)可以在粉末床的上方使用。線性電機驅(qū)動的XY龍門不能實現(xiàn)滿足目標(biāo)生產(chǎn)率所要求的速度。掃描速度要求為幾米每秒,所以選擇XY振鏡掃描頭作為光束控制的工具。唯一的問題就是,當(dāng)零部件在XY上的尺寸為250×250mm時,振鏡掃描頭的視野是100×100mm。還有,在應(yīng)用了平場聚焦透鏡(f-thetalens)理論校正文件的基礎(chǔ)上,掃描頭的精度為±50μm。
有幾種方法可以用來解決振鏡掃描頭的視野受到限制的問題。第一種方法是借助一種步進(jìn)掃描技術(shù)。即讓振鏡掃描頭超高速移動,再用伺服軸來進(jìn)行轉(zhuǎn)位。在掃描過程中,伺服軸會保持振鏡掃描頭的位置。使用此方法,將振鏡視野(FOV)之外移動的范圍與每一個視野的邊緣“縫合”在一起。此外,考慮到掃描鏡將激光光束向平場聚焦透鏡的范圍移動,光斑尺寸會發(fā)生變形,還會產(chǎn)生更高水平的定位誤差。因此,有必要找到一個合適的工業(yè)控制器來將伺服運動和振鏡運動整合在一起,這將帶來兩個好處。第一個是消除“縫合”帶來的任何誤差。第二是在保持快速加工的同時,還能將振鏡掃描軸的視野限制在更精準(zhǔn)并且變形更小的透鏡中央?yún)^(qū)域。在振鏡掃描頭下,較慢的伺服運動不斷地移動部件,使其“重新居中”。
現(xiàn)在該審查我們的機械設(shè)計了。此時,該系統(tǒng)包含了帶有合適的水平調(diào)節(jié)腳和隔振系統(tǒng)的機器底座,以及帶有XY掃描頭的XYZ龍門運動系統(tǒng),還有一些工藝要求能幫助我們縮小控制器的選擇范圍。之后就該確定底座板的材料,最后再重新審視機器底座的設(shè)計。該系統(tǒng)的所有部件必須在一起工作,所以重要的是要確保機器底座和運動設(shè)備能無縫連接在一起工作。
底座板
底座板的材料能顯著影響機器的性能。通常情況下會選擇鋼鐵、鋁和花崗巖。花崗巖由于具有出色的平整度,因而是充當(dāng)?shù)鬃宓睦硐脒x擇,平坦的底座將能提高運動系統(tǒng)的性能,因為平整度誤差會被轉(zhuǎn)移到安裝在底座上的平臺中(圖3)。這是由于底座板的剛性通常不如它們負(fù)載的設(shè)備。花崗巖的缺點包括成本,還有難以與那些需要通過特殊插入處理(例如鉆孔和螺紋孔)來連接的設(shè)備一起工作,并且其熱膨脹系數(shù)與安裝在其上的設(shè)備有所不同。最終,我們將基于性能來下決定,但實際上也可以歸結(jié)為成本和實用性的考慮。例如,如果價格較低的機械加工表面規(guī)格與鋁合金厚板合適,那么我們可能就不會選擇花崗巖。重新審視機器底座的設(shè)計,將確保能為其上的運動系統(tǒng)提供合適的支撐結(jié)構(gòu)。
圖3:包含XY振鏡掃描系統(tǒng)的龍門式運動系統(tǒng)。
控制器的評估
現(xiàn)在該評估運動控制器了。我們應(yīng)該知道操作該機械系統(tǒng)所需要的控制器應(yīng)該具有什么功能,這將能幫助縮小我們的選擇范圍。一些關(guān)鍵的考慮因素包括:哪種類型的控制器可以管理五軸協(xié)調(diào)運動?這種控制器可以連續(xù)處理大的零部件嗎?如果可以,那么編程有多困難?如何將控制器與工業(yè)激光進(jìn)行對接?激光可以根據(jù)距離和/或均勻的速度來脈沖嗎?如何控制脈沖寬度?如何將機器功能所需的控件和加工要求的控件配合在一起?正確地回答這些問題之后,選擇的控制器就能幫助該機器如設(shè)想中地工作。因此,重要的是不僅要了解粉末材料與激光之間的相互作用,也要了解這種相互作用在三維空間中是如何體現(xiàn)的。
考慮到這一點,我們的目標(biāo)是,將振鏡掃描器運動和伺服運動整合起來以消除“縫合”的影響,此外還有最大化生產(chǎn)率,以及在平場聚焦透鏡的中央?yún)^(qū)域進(jìn)行工作。激光光斑尺寸和脈沖必須保持一致,并且要盡量杜絕變形。步進(jìn)掃描的啟動和停止會造成不利影響,它應(yīng)該是持續(xù)移動的。此外,使用振鏡掃描頭將能實現(xiàn)一些獨特的功能,例如快速振蕩(抖動)激光來創(chuàng)建“更厚”的部件路徑。振鏡掃描頭非常高的加速度能實現(xiàn)更有效的轉(zhuǎn)向操作,此功能對那些有很多方向變化的零部件極為有用。如果存在方向變化,那么設(shè)置基于勻速的激光脈沖時間將非常困難??梢愿櫣ぷ餍谐桃约案鶕?jù)向量距離來觸發(fā)脈沖的控制器將能幫助實現(xiàn)這一操作。目標(biāo)是在這一選擇性激光微燒結(jié)過程中保持一致的結(jié)構(gòu)。
最后,結(jié)合了振鏡掃描頭和平場聚焦透鏡后,在透鏡中央25×25mm區(qū)域內(nèi)的精度是±30μm,這已經(jīng)經(jīng)過了理論校正。該運動的可重復(fù)性非常好,但是還不夠精準(zhǔn)。有什么辦法來校準(zhǔn)該區(qū)域以獲得更精確的結(jié)果呢?除了伺服系統(tǒng)的精度之外還有振鏡掃描頭和平場聚焦透鏡的精度,所以誤差越小越好。如何校正振鏡掃描頭來實現(xiàn)最高水平的精度,并且還能與攜帶它的伺服軸保持對齊?我們還有很多問題。
小結(jié)
從快速成型制造和利用SLS根據(jù)方案設(shè)計來制造產(chǎn)品出發(fā),要進(jìn)行30μm及其以下的選擇性激光微燒結(jié)我們還需要進(jìn)行一系列新的思考。這些考慮因素大多都簡單明了。為了制作更小尺寸的產(chǎn)品,我們需要更小的粉末顆粒,以及較小的激光光斑尺寸。另一項要求是要能控制激光脈沖以控制能量的輸入。在概念上來說,這些要求是很容易理解的。
與此相對應(yīng)的是,本文提出的運動系統(tǒng)具有五個運動軸,每一個都有著獨特的誤差。雖然我們討論了其中的很多問題,但還有更多并未涉及。例如,管理粉床的粉層水平調(diào)節(jié);管理粉床的一致性,因為粉末材料隨著粒徑減小而有著不同的表現(xiàn);使用噴嘴式送粉技術(shù);維持噴嘴式送粉的正常運行;對零部件進(jìn)行三維方向的編程,并且在五個移動軸上執(zhí)行該編程文件。諸如此類,不勝枚舉。因此,重要的是考慮如何確保你的運動系統(tǒng)能在三維空間中正確執(zhí)行每一個動作。由于這些運動的要求變得越來越有技術(shù)挑戰(zhàn)性,因此對于哪些任務(wù)可以在內(nèi)部解決,哪些任務(wù)需要借助合作伙伴的幫助來做出正確決定,你要做到心中有數(shù)。
轉(zhuǎn)載請注明出處。

 相關(guān)文章
相關(guān)文章
 熱門資訊
熱門資訊
 精彩導(dǎo)讀
精彩導(dǎo)讀

















 關(guān)注我們
關(guān)注我們