





1. 應(yīng)用背景
2. 自動化技術(shù)應(yīng)用
2.1 器件自動找平技術(shù)
2.2 器件自動耦合技術(shù)

2.3 耦合算法技術(shù)

3. 激光焊接技術(shù)應(yīng)用
3.1 激光焊接機(jī)
4. 應(yīng)用分析
在行業(yè)內(nèi),傳統(tǒng)的光通訊器件封裝技術(shù),一般是通過UV膠將器件在結(jié)合面處粘接固定起來,先是將UV膠點到器件結(jié)合處,再通過紫外線燈照射固化。這種器件連接方式,存在許多缺陷,比如,固化深度有限;受器件幾何形狀限制;紫外線燈照射不到的地方膠不會固化。既要有點膠裝置,又要設(shè)置紫外燈,使得整個系統(tǒng)機(jī)構(gòu)變得比較復(fù)雜,最主要的是在器件實際使用時,由于受熱等因素,會存在上下器件在結(jié)合處出現(xiàn)微量的位置偏移,導(dǎo)致器件耦合功率值失常,精度下降,影響產(chǎn)品質(zhì)量,還有生產(chǎn)節(jié)拍長,效率不高。而采用激光焊接這種新型的焊接技術(shù),其所具備的焊接牢固、變形極小、精度高、速度快、易實現(xiàn)自動控制等優(yōu)點,使之成為光通訊器件封裝技術(shù)的重要手段之一。為此,大族激光精密焊接事業(yè)部自主研制一款高速自動耦合激光焊接系統(tǒng),這是集激光焊接及其工藝技術(shù)、自動化控制技術(shù)于一體的系統(tǒng)。
2. 自動化技術(shù)應(yīng)用
2.1 器件自動找平技術(shù)
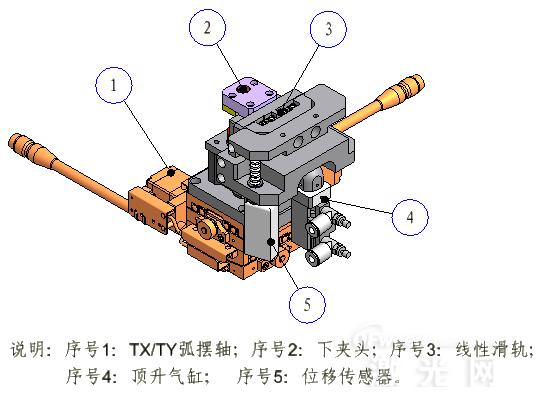
通過傳感器控制技術(shù)及電動弧擺機(jī)構(gòu),來實現(xiàn)光通訊器件的調(diào)節(jié)環(huán)(Z環(huán))和適配器接觸面貼合,即器件自動找平。通常要求兩個面間隙控制在0.01~0.03mm之間。
依照耦合器件工作機(jī)理及封裝工藝的要求,調(diào)節(jié)環(huán)(Z環(huán))與適配器接觸面必須貼平,才能滿足器件使用要求。調(diào)節(jié)環(huán)(Z環(huán))是夾持在上夾頭上,上夾頭只做上下移動,不能擺動,定為基準(zhǔn)面,所以,如果要求調(diào)節(jié)環(huán)(Z環(huán))與適配器接觸面能有效貼平,就得讓適配器能自動與調(diào)節(jié)環(huán)(Z環(huán))接觸面貼平。適配器夾持在下夾頭上,下夾頭安裝在滑動塊上面,可以順暢滑動,通過上頂氣缸頂起,當(dāng)Z 軸向下運動,調(diào)節(jié)環(huán)(Z環(huán))壓緊適配器時,下夾頭向下運動(Z 軸的力大于上頂氣缸的力,上頂氣缸氣路安裝有精密減壓閥,可通過精密減壓閥調(diào)整上頂力)。當(dāng)滑動塊上下移動時,高精度位移傳感器檢測到位移量的變化,與此同時,電動弧擺機(jī)構(gòu)按照設(shè)定的運動軌跡擺動,當(dāng)位移傳感器檢測到位移量最小且數(shù)值無變化時,調(diào)節(jié)環(huán)(Z環(huán))與適配器貼平,以上就是器件自動找平機(jī)理。自動找平機(jī)構(gòu)詳圖如下:
2.2 器件自動耦合技術(shù)
我們在2.1中講到器件找平原理,接下來按照工藝流程順序,就要進(jìn)行器件自動耦合找光,即找到目標(biāo)光功率值,找到目標(biāo)光功率值后通過激光自動焊接,完成器件的封裝。
針對光通訊器件焊接的特殊工藝要求,我們采用三軸聯(lián)動精確控制技術(shù),按照規(guī)定的螺旋線耦合軌跡進(jìn)行找光。由于找光精度極高,所以,我們采用進(jìn)口超高精度運動元件,實現(xiàn)器件自動耦合找光,即通過XY軸和Z軸差補(bǔ)運動,走螺旋線軌跡來找到上下器件目標(biāo)光功率值。
自動耦合控制技術(shù)有如下特點:
a.耦合采用高性能高精度運動元件,結(jié)合我們自主開發(fā)的先進(jìn)控制軟件耦合算法,達(dá)到很高的耦合效率;
b.找平和耦合過程實時顯示分布曲線,目的是能直觀地顯示找平和耦合的過程,只有當(dāng)標(biāo)準(zhǔn)的、完整的、光滑的正態(tài)分布曲線出現(xiàn)時,才說明找平或耦合達(dá)到預(yù)期的目標(biāo)值;
c.單獨操作各個軸的移動和調(diào)試,方便測得耦合參數(shù);
d.友好的軟件操作界面,自動時可根據(jù)不同器件的工藝編寫不同的程序(F-Basic編程,簡單易學(xué)),并可保存下來方便客戶下次調(diào)用;
e.耦合參數(shù)設(shè)置簡單方便,耦合方式可選(耦合方式包括X軸、Y軸、Z軸單獨耦合,XY兩軸同時耦合,XYZ三軸同時耦合),耦合過程自動完成;
f.焊接頭自動調(diào)整,自動實現(xiàn)不同高度、不同直徑器件的焊接;
g.CCD圖像實時監(jiān)控各個焊點,方便客戶實時觀察焊點的情況。
自動耦合機(jī)構(gòu)詳圖如下:
無論是器件自動找平技術(shù)還是器件自動耦合技術(shù),都是通過自動化控制技術(shù)和相關(guān)的思維策略來實現(xiàn)的,為實現(xiàn)自動耦合找光目標(biāo),我們精心設(shè)計這套精密運動機(jī)構(gòu),實現(xiàn)六軸聯(lián)動。這套機(jī)構(gòu)還具有一定的柔性功能,可以通過快速切換相應(yīng)的焊接治具,實現(xiàn)對不同器件的自動耦合焊接。
2.3 耦合算法技術(shù)
針對光通訊器件找光的精細(xì)要求,根據(jù)裝置的運動機(jī)理,需研究一種運動軌跡,能快速地找到器件耦合的目標(biāo)光功率值。為此,我們采用按螺旋線軌跡運動的算法,從規(guī)定的某點開始,XY軸作差補(bǔ)運動,走細(xì)分的螺旋線運動軌跡,從內(nèi)到外以螺旋線運動的方式,直到找到目標(biāo)光功率值。采用這種方法可以快速地、精確地找到耦合的目標(biāo)光功率值。通過耦合曲線實時顯示直觀的耦合效果(如下圖)。
3. 激光焊接技術(shù)應(yīng)用
激光焊接作為一種高質(zhì)量、高精度、高效率和高速度的焊接方法,日益受到人們的關(guān)注和應(yīng)用。由于激光的能量密度很高,因此,激光焊接速度快、焊接深度深、熱影響區(qū)小,可實現(xiàn)自動化精密焊接。
3.1 激光焊接機(jī)
光通訊器件激光封裝技術(shù)對焊接機(jī)能量分配及能量的穩(wěn)定性要求非常高,要求三路光(或六路光)能量偏差值≤0.03J。為滿足這種要求,我們自主研制一款專用激光焊接機(jī)WF80。
3.2焊接工藝研究
a.焊點分布:可同時焊接3槍,圓周方向9個位置的焊點(穿透焊與平焊焊點分布相同)。另外,可自修改程序更改焊點分布情況。
b.可同時做平焊和穿透焊,要求平焊與穿透焊直徑、熔深參數(shù)一致。
c.具有補(bǔ)焊功能,即焊接時不良可直接補(bǔ)焊(設(shè)備有這個功能,但使用可選可不選)。
d.焊接完后,功率偏差在5%以內(nèi)的直通率要求90%以上,老化測試后的直通率要求不變化。
e.焊點直徑大小0.4~0.7mm;焊點熔深大小0.3~0.6mm ;剪切力≥42Kg。
f.通過調(diào)整焊接機(jī)的能量、焊槍的入射角及精細(xì)變焦等工藝參數(shù),觀察火花的明亮程度和聽激光打在器件上的聲音,來初步判斷焊接的效果。最終,通過測試器件焊斑大小、熔深的的大小來判斷器件是否滿足要求。
4. 應(yīng)用分析
激光焊接技術(shù)在光通訊行業(yè)上的應(yīng)用其實并不是特別新奇,在這個領(lǐng)域,韓國和臺灣已經(jīng)有自動耦合設(shè)備投入市場,但是,由于他們設(shè)備價格偏高,國內(nèi)許多用戶難以適應(yīng),再加上光通訊器件對焊接設(shè)備精度和激光焊接工藝要求越來越高,就要求設(shè)備更加精量化,更加穩(wěn)定可靠易操作,所以,進(jìn)口設(shè)備也面臨著諸多挑戰(zhàn)。所以,為滿足市場需求,基于大族激光精密焊接事業(yè)部在激光焊接及自動化控制技術(shù)領(lǐng)域的領(lǐng)先優(yōu)勢,我們研制了一款高速自動耦合激光焊接系統(tǒng)。
從焊接工藝性的角度看,激光焊接技術(shù)在光通訊器件封裝上的應(yīng)用相對比較成熟,但是,從自動耦合技術(shù)到焊接工藝還有很大的提升空間。耦合機(jī)構(gòu)如何能做到更加簡單可靠,夾持器件的夾具如何能做到快速切換、精準(zhǔn)定位,耦合算法如何更加簡潔,這些都需要不斷創(chuàng)新完善,來提高整個系統(tǒng)的穩(wěn)定性、可靠性及機(jī)器調(diào)試可操作性。期望通過研發(fā)能力的不斷提升,將先進(jìn)的技術(shù)融入研發(fā)設(shè)計中,從而來保證機(jī)器性能的領(lǐng)先性。
轉(zhuǎn)載請注明出處。

 相關(guān)文章
相關(guān)文章
 熱門資訊
熱門資訊
 精彩導(dǎo)讀
精彩導(dǎo)讀
















 關(guān)注我們
關(guān)注我們